


PROMOÇÕES E OFERTAS
Descontos em vários produtos DJI, EMLID e Pix4D




 Pagamento seguro
Pagamento seguro Envio em 24/48h
Envio em 24/48h Parecer técnico
Parecer técnicoZenmuse L2
A partir de: 10.818,15€
DJI Zenmuse L2 – Lidar aéreo para drone
Zenmuse L2 integra quadro LiDAR, um sistema IMU de alta precisão autodesenvolvido e uma câmera de mapeamento RGB com 4/3 CMOS para permitir que as plataformas de vôo DJI Matrice 350 RTK e Matrice 300 RTK obtenham dados geoespaciais mais precisos, eficientes e confiáveis.
Quando usado com DJI Terra, oferece uma solução completa e pronta para uso para coleta de dados 3D e pós-processamento de alta precisão. Pode ser usado em topografia, engenharia, construção, agricultura, segurança, inspeção e mapeamento de terras, e energia elétrica, silvicultura e gestão de infraestrutura.
Principais características
- Alta precisão
- Precisão vertical: 4 cm.
- Precisão horizontal: 5 cm.
- Eficiência excepcional
- 2,5 km2 percorridos num único voo.
- Penetração superior
- Pontos de laser menores, nuvens de pontos mais densas.
- Faixa de detecção
- 250 m com 10% de refletividade e 100 lx
- 450 m com 50% de refletividade e 0 lx
- 5 retornos.
- Tudo em um, pronto para usar.
- Visualização ao vivo da nuvem de pontos.
- Processamento no DJI Terra com apenas um clique.
Aproveite e adquira, junto com o seu sensor, o curso de treinamento personalizado sobre o uso desta ferramenta ministrado por nossos engenheiros: Curso de Treinamento DJI Lidar
 Melhoramos o seu orçamento: Não hesite em contactar-nos!
Melhoramos o seu orçamento: Não hesite em contactar-nos!
Também pode gostar…
-

DJI Matrice 350 RTK
A partir de: 10.390,00€ Ver opções This product has multiple variants. The options may be chosen on the product page -

Curso LiDAR – Matrice 350 RTK & Zenmuse L2
Ler mais
Solução integrada LiDAR
Graças ao seu poderoso hardware, o L2 fornece varredura precisa de assuntos complexos em um alcance estendido e aquisição mais rápida de nuvens de pontos. Durante as operações, os usuários podem visualizar, ler e processar modelos de nuvem de pontos no local, com relatórios de tarefas de alta qualidade gerados pela DJI Terra, oferecendo uma solução simples e exclusiva para melhorar a eficiência geral. Assim, os usuários podem obter nuvens de pontos muito precisas através de um pós-processamento de uma única etapa.

Faixa de detecção aumentada em 30%[5]
O L2 pode detectar 250 metros a 10% de refletividade e 100 klx[3-, e até 450 metros a 50% de refletividade e 0 klx.[3- A altitude operacional típica agora se estende até 120 metros, para um aumento significativo da segurança e da eficiência operacional.
Pontos de laser menores, nuvens de pontos densas
Com um tamanho de ponto reduzido de 4 x 12 cm a 100 m, ou 1/5 do de L1, L2 não só detecta objetos menores com mais detalhes, mas também pode penetrar uma vegetação mais densa, gerando assim modelos de elevação digital mais precisos (NMRs).
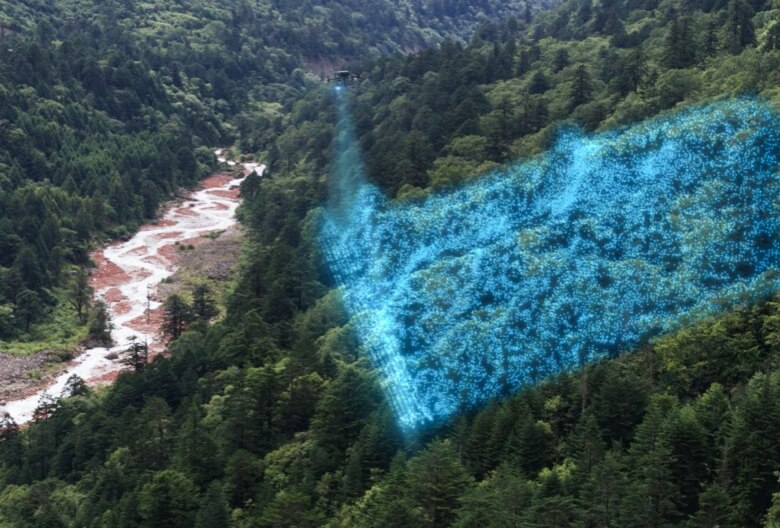
Suporta 5 retornos
Em áreas com vegetação densa, L2 pode captar mais pontos de solo sob a folhagem.
Taxa de nuvem de ponto efetiva: 240.000 pontos/s
No modo de retorno único ou múltiplo, o L2 pode atingir uma taxa máxima de emissão de nuvens de 240.000 pontos por segundo, para uma aquisição de dados de nuvem de pontos maior durante um determinado período de tempo.
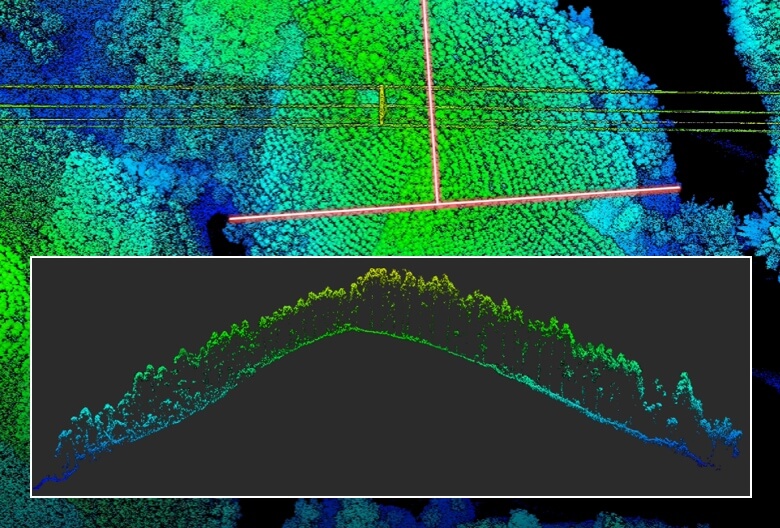
Dois modos de digitalização
O L2 suporta dois modos de digitalização, oferecendo flexibilidade aos usuários de acordo com os requisitos de sua tarefa. No modo de digitalização repetitivo, o LiDAR da L2 pode alcançar nuvens de pontos mais uniformes e precisas, atendendo aos requisitos de mapeamento de alta precisão. No modo de varredura não repetitivo, oferece uma penetração mais profunda para obter mais informações estruturais, uma solução ideal para inspeção de linha de alta tensão, levantamento florestal e outros cenários.
Design no quadro
O design baseado em framework fornece uma taxa de dados de nuvem de pontos eficiente de até 100%. Combinado com uma nacele de três eixos, oferece mais possibilidades para cenários de pesquisa.
Sistema de alta precisão IMU
Aumento da precisão
O sistema IMU de alta precisão desenvolvido internamente, combinado com o sistema de posicionamento RTK do drone para fusão de dados durante o pós-processamento, permite que o L2 acesse informações muito precisas sobre a posição, velocidade e atitude do drone. Além disso, o aumento da adaptabilidade ambiental do sistema IMU melhora a confiabilidade operacional e a precisão do L2.
- Precisão do guisão [6]
- Tempo real: 0,2 º, pós-tratamento: 0,05º
- Precisão do pitch/rolling [6]
- Tempo real: 0.05°; pós-tratamento: 0.025°
Nenhum pré-aquecimento da IMU
O desempenho do sistema IMU se beneficia de melhorias acentuadas e o sistema acaba por estar operacional imediatamente sob energia. Além disso, o drone que acompanha é imediatamente operacional para o RTK de estado fixo, para uma experiência de campo otimizada.
Câmera de mapeamento RGB

CMOS 4/3, obturador mecânico
O tamanho dos pixels aumentou para 3,3 mícrons, e os pixels reais agora são 20 MP, resultando em uma melhoria significativa na imagem global, bem como uma nuvem mais detalhada de pontos de cor autênticos. O intervalo mínimo entre as fotos foi reduzido para 0,7 segundos. A câmera de mapeamento pode ser usada mais de 200.000 vezes, reduzindo assim os custos operacionais. Na ausência da necessidade de coletar nuvens de pontos, a câmera RGB ainda pode tirar fotos e vídeos, ou coletar imagens para o mapeamento da luz visível.
Melhor experiência operacional
Notas:
Medido em um laboratório DJI sob as seguintes condições: zenmuse L2 montado em uma lagoa de 350 RTK e energizado. Usando a trajetória da zona DJI Pilot 2 para planejar a trajetória de voo (com a calibração IMU habilitada). Uso de varredura repetitiva com o RTK no estado “fixo”. A altitude relativa foi definida acima de 150 m, a velocidade de voo acima de 15 m/s, a inclinação da nacele em -90 graus e cada segmento reto da trajetória de voo foi inferior a 1.500 m. O campo continha objetos com características angulares óbvias e pontos de controle usados expostos em solo duro, de acordo com o modelo de reflexão difusa. DJI Terra foi utilizado para pós-processamento com a função Optimize a precisão da nuvem de ponto ativado. Nas mesmas condições, em caso de não ativação do Optimize a precisão da nuvem de ponto, a precisão vertical é de 4 cm e a precisão horizontal é de 8 cm.
Dados medidos com zenmuse L2 montados em matriz de 350 RTK com velocidade de voo de 15 m/s, altitude de voo de 150 m, uma sobreposição lateral de 20%, com tronco do IMU ativado, Otimização da elevação desativada e rastreamento de terreno desativado.
Os dados apresentados são valores típicos. Medido por um sujeito plano cujo tamanho é maior que o diâmetro do feixe de laser, com ângulo de incidência perpendicular e visibilidade atmosférica de 23 km. Em ambientes com pouca luz, os raios laser podem atingir a faixa de detecção ideal. Se um feixe de laser tocar mais de um objeto, a potência total do emissor do laser é dividida e a faixa alcançável é reduzida. O alcance máximo de detecção é de 500 m.
O módulo IMU não requer pré-aquecimento após o powering. No entanto, os usuários devem esperar até que o RTK do drone esteja em um estado fixo antes de qualquer voo ou operação.
Cálculos realizados por comparação com L1 zenmuse.
Medido em um laboratório DJI sob as seguintes condições: zenmuse L2 montado em um tapete de 350 RTK e energizado. Usando a trajetória da zona DJI Pilot 2 para planejar a trajetória de voo (com a calibração IMU habilitada). RTK em um estado “fixo”. A altitude relativa foi definida acima de 150 m, a velocidade de voo acima de 15 m/s, a inclinação da nacele em -90 graus e cada segmento reto da trajetória de voo foi inferior a 1.500 m.
Os modelos 3D são processados por representação esparsa.
O que se é. Apenas as razões de qualidade dos pontos de passagem, zonas e tarefas lineares podem ser geradas.
Especificações
General
Nome do produto
- Zenmuse L2
Dimensões
- 155 x 128 x 176 mm (L x l x A)
Peso
- 905 x 5 g
Comida
- 28 W (padrão)
58 W (máx.)
Indice de proteção
- IP54 (IP54)
Aparelhos compatíveis
- Matrice de 300 RTK (DJI RC Plus necessário)
Matrice 350 RTK
Temperatura de armazenamento
- -20 a 60 graus Celsius
Desempenho do sistema
Escopo de detecção
- Refletividade de 450 m a 50%, 0 klx
Refletividade de 250 m a 10%, 100 klx
Dados típicos. Medido com um sujeito plano em tamanho maior que o diâmetro do feixe de laser, com ângulo de incidência perpendicular e visibilidade atmosférica de 23 km.
Taxa de nuvens de pontos
- Retorno único: 240.000 pts/s max.
Retornos múltiplos: 1,200,000 pt/s max.
A precisão do sistema
- Horizontal: 5 cm a 150 m
Vertical: 4 cm a 150 m
Medido em um laboratório DJI sob as seguintes condições: zenmuse L2 montado em uma lagoa de 350 RTK e energizado. Usando a trajetória da zona DJI Pilot 2 para planejar a trajetória de voo (com a calibração IMU habilitada). Uso de varredura repetitiva com o RTK no estado “fixo”. A altitude relativa foi definida acima de 150 m, a velocidade de voo acima de 15 m/s, a inclinação da nacele em -90 graus e cada segmento reto da trajetória de voo foi inferior a 1.500 m. O campo continha objetos com características angulares óbvias e pontos de controle usados expostos em solo duro, de acordo com o modelo de reflexão difusa. DJI Terra foi utilizado para pós-processamento com a função Optimize a precisão da nuvem de ponto ativado. Nas mesmas condições, em caso de não ativação do Optimize a precisão da nuvem de ponto, a precisão vertical é de 4 cm e a precisão horizontal é de 8 cm.
Codificação de cores em tempo real de nuvens de pontos
- Refletividade, altura, distância, RGB
LiDAR
Precisão de medição (RMS 1)
- 2 cm a 150 m
Medido em um ambiente de 25o C (77oF) com um sujeito com refletividade de 80% a uma distância de 150 m. O ambiente real pode diferir do ambiente de teste. Os números apresentados são apenas indicativos.
Retorne máximo suportado
- 5
Modos de digitalização
- Modelo de digitalização não repetitivo, modelo de varredura repetitiva
FOV (escopo da visão)
- Modelos de digitalização repetitivos: 70o (horizontal), 3o (vertical)
Modelos de digitalização não repetitivos: 70o (horizontal), 75o (vertical)
Faixa de detecção min.
- 3 m
Divergência do raio laser
- 0.2 mrad (horizontal), 0,6 mrad (vertical)
Medido sob condições de largura total no meio-máximo (FWHM). 0,6 mrad corresponde a um aumento de 6 cm no diâmetro do feixe de laser para cada aumento de 100 m de distância.
Comprimento de onda do laser
- 905 nm (m)
Tamanho do ponto do laser
- 4 cm (horizontal), 12 cm (vertical) 100 m (FWHM)
Frequência de emissão de pulso de laser
- 240 kHz
Segurança do laser
- Classe 1 (IEC 60825-1:2014)
Limite de emissão acessível (LEA)
- 233.59 nJ
Abertura de referência
- Abertura real: 23,85 mm (equivalente a uma abertura circular)
Potência máxima de emissão de pulso de laser em 5 nanossegundos
- 46.718 W
Sistema de navegação inercial
Frequência da atualização UMI
- 200 Hz
Faixa do acelerômetro
- – 6 g
Faixa de medição de velocidade angular
- – 300 dps
Precisão da cena do guinada (RMS 1-)
- Tempo real: 0,2 graus, pós-tratamento: 0,05 graus
Medido em um laboratório DJI sob as seguintes condições: zenmuse L2 montado em um tapete de 350 RTK e energizado. Usando a trajetória da zona DJI Pilot 2 para planejar a trajetória de voo (com a calibração IMU habilitada). RTK no estado “fixo”. A altitude relativa foi definida acima de 150 m, a velocidade de voo acima de 15 m/s, a inclinação da nacele em -90 graus e cada segmento reto da trajetória de voo foi inferior a 1.500 m.
Precisão de pitch/rolling (RMS 1)
- Tempo real: 0,05, pós-tratamento: 0,025
Medido em um laboratório DJI sob as seguintes condições: zenmuse L2 montado em uma lagoa de 350 RTK e energizado. Usando a trajetória da zona DJI Pilot 2 para planejar a trajetória de voo (com a calibração IMU habilitada). RTK no estado “fixo”. A altitude relativa foi definida acima de 150 m, a velocidade de voo acima de 15 m/s, a inclinação da nacele em -90 graus e cada segmento reto da trajetória de voo foi inferior a 1.500 m.
Precisão do posicionamento horizontal
- Corrigido TK: 1 cm x 1 ppm
Precisão do posicionamento vertical
- Corrigido TK: 1,5 cm 1 ppm
Câmera de mapeamento RGB
Sensor de imagem
- CMOS 4/3, pixels efetivos: 20 MP
Objectivo
- FOV: 84 euros
Equivalente: 24 mm
Aberto: f/2.8 a f/11
Pontos de foco: 1 m a .pi. (com foco automático)
Velocidade de fechamento
- Obturador mecânico: 2 a 1/2 000 s
Obturador eletrônico: 2 a 1/8 000 s
Número de persianas
- 2 0000 (es)
Relação de fotos
- 5,280 x 3.956 (4:3)
Modos fotográficos fixos
- Foto tirada em Single: 20 MP
Intervalo: 20 MP
Intervalo de tempo JPEG: 0.7/1/2/3/5/7/10/15/20/30/60 s
Intervalo de tempo RAW/JPEG – RAW: 2/3/5/7/10/15/20/30/60 s
Codec e resolução de vídeo
- H.264 em Inglês
4K: 3.840 x 2.160 a 30 fps
FHD: 1.920 x 1.080 a 30 fps
ISO
- Vídeo: 100 a 6,400
Foto: 100 a 6.400
Taxa binária de vídeo
- 4K: 85 Mb/s
FHD: 30 Mb/s
Arquivos de sistema suportados
- exFAT
Formato de foto
- JPEG/DNG (RAW)
Formatos de vídeo
- MP4 (MPEG-4 AVC/H.264)
Nacelle (em (em)
Sistema de estabilização
- 3-eixo (inclinação, rolo, pano)
Faixa de vibração angular
- 0,01 em
Montagem
- DJI SKYPORT destacável
Ampliação mecânica
- Inclinação: -143 a 43o
Pano: 105 euros
– Limite estrutural, intervalo não ajustável.
Faixa ajustável
- Inclinação: -120 a 30 euros
Pano: 90 graus
Método de operação
- Seguir / Liber
Armazenamento de dados
Armazenamento de dados brutos
- Arquivos fotográficos/IMU/Dotpoint/GNSS/Calibração
Armazenamento de dados de nuvem de pontos
- Armazenamento de dados de modelagem em tempo real
Cartões MicroSD suportados
- microSD: velocidade de escrita sequencial de 50 Mb/s ou superior e UHS-I de classe 3 ou superior. Max. capacidade. : 256 GB. Cartões microSD recomendados.
Cartões microSD recomendados
- Lexar 1066x 64 GB U3 A2 V30 microSDXC
Lexar 1066x 128 GB U3 A2 V30 microSDXC
Rio de Janeiro Canvas Go Mais 128 GB U3 A2 V30 microSDXC
Lexar 1066x 256 Go U3 A2 V30 microSDXC
Pós-tratamento
Software de apoio
- DJI Terra em
Formato de dados
- DJI Terra suporta a exportação de modelos de nuvem de pontos nos seguintes formatos:
PNTS/LAS/PLY/PCD/S3MB
Dúvidas? Você já tem um orçamento e quer que melhoremos?
Produtos Relacionados


