

PROMOCIONES Y OFERTAS
Compra nuestros productos por renting y paga en cuotas mensuales
Descuentos en múltiples productos de DJI, EMLID y Pix4D




 Pago seguro
Pago seguro Envío en 24/48h (excepto productos en reserva)
Envío en 24/48h (excepto productos en reserva) Asesoramiento técnico
Asesoramiento técnicoPack: DJI Matrice 350 RTK + Zenmuse L2
18.785,00€ precio sin IVA
Sin existencias
Pack DJI Matrice 350 RTK + Zenmuse L2
Pack completo para realizar levantamientos técnicos con lidar y fotogrametría, e inspecciones técnicas con lidar en redes eléctricas y otras infraestructuras que incluye los siguientes elementos:
- Dron DJI Matrice 350 RTK.
- Sensor Lidar Zenmuse L2.
- Curso de formación personalizado sobre el uso del pack adquirido impartido por ingenieros certificados por DJI (DJI ENT Solutions Engineer (Inspection)).
Zenmuse L2 integra LiDAR de marco, un sistema de IMU de alta precisión y de desarrollo propio y una cámara de mapeo RGB con CMOS 4/3 que permiten a las plataformas de vuelo de DJI Matrice 350 RTK y Matrice 300 RTK obtener datos geoespaciales más precisos, eficientes y fiables.
Cuando se usa con DJI Terra, ofrece una solución todo en uno y lista para usarse para la recopilación de datos 3D y el posprocesamiento de alta precisión. Se puede usar en topografía, ingeniería, construcción, agricultura, seguridad, para la inspección y cartografía de terrenos y la gestión de energía eléctrica, forestal y de infraestructuras.
También te recomendamos…
-

Zenmuse L2
Desde: 10.818,15€ Seleccionar opciones Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto -

Matrice 4T – Pack Plus de Tranquilidad
5.700,00€ precio sin IVA Añadir al carrito -

Matrice 4E – Pack Plus de Tranquilidad
3.800,00€ precio sin IVA Añadir al carrito
Solución LiDAR integrada
Gracias a su potente hardware, la L2 permite escanear de forma precisa objetivos complejos con un mayor alcance y obtener nubes de puntos más rápidamente. Durante las operaciones, los usuarios pueden previsualizar, reproducir y procesar sobre el terreno modelos de nubes de puntos, con informes de calidad de las tareas generados por DJI Terra, para ofrecer una solución simple y en un solo paso que mejora la eficiencia general. Esto permite a los usuarios lograr resultados de alta precisión en las nubes de puntos, con posprocesamiento en un solo paso.

Aumento del 30 % del alcance de detección [5]
La L2 puede detectar desde 250 m con reflectividad del 10 % y 100 klx, [3] y desde 450 m con reflectividad del 50 % y 0 klx. [3] La altitud operativa típica aumenta ahora hasta 120 metros, lo que mejora notablemente la seguridad y la eficiencia operativas.
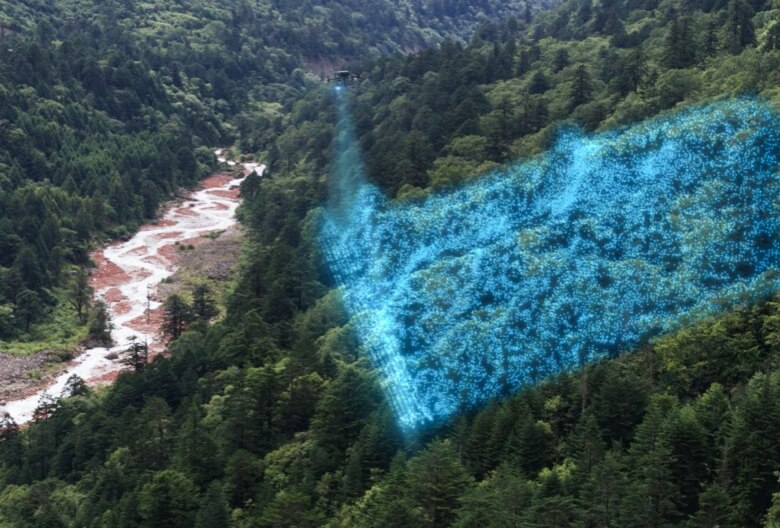
Puntos láser más pequeños, nubes de puntos más densas
Con un reducido tamaño de los puntos de 4×12 cm a 100 m (solo una quinta parte del de la L1), la L2 no solo detecta objetos más pequeños con un mayor nivel de detalle, también puede penetrar por vegetación más densa y generar modelos de elevación digital (Digital Elevation Models, DEM) más precisos.
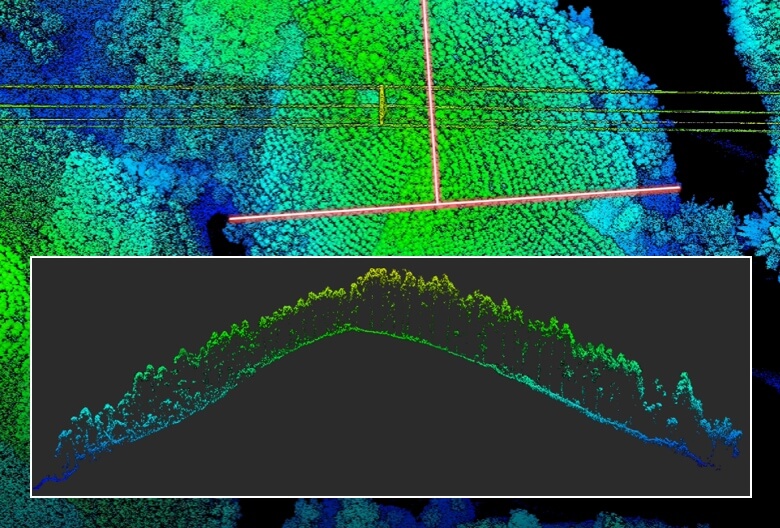
Admite 5 retornos
En áreas de mucha vegetación, la L2 puede capturar más puntos de tierra bajo las hojas.
Tasa de nube de puntos efectiva: 240 000 pts./s
En los modos de retorno único y múltiple, la L2 puede alcanzar una tasa de emisión de nube de puntos de 240 000 puntos por segundo, lo que permite obtener más información de las nubes de puntos en un plazo determinado.
Dos modos de escaneo
La L2 cuenta con dos modos de escaneo para ofrecer a los usuarios flexibilidad según lo que demande su tarea. En el modo de escaneo repetitivo, el LiDAR de la L2 puede lograr nubes de puntos más uniformes y precisas, a la vez que cumple los requisitos de la cartografía de alta precisión. En el modo de escaneo no repetitivo, ofrece una penetración más profunda para obtener más información estructural, por lo que es adecuada para inspección de líneas de alta tensión, topografía forestal y otros escenarios.
Diseño basado en marco
El diseño basado en marco da como resultado una tasa efectiva de nube de puntos de hasta un 100 %. Junto con un estabilizador de tres ejes, ofrece más posibilidades para la topografía.
Sistema de IMU de alta precisión
Precisión mejorada
El sistema de IMU de alta precisión de desarrollo propio, combinado con el sistema de posicionamiento por RTK del dron para la fusión de datos durante el posprocesamiento, proporciona a la L2 acceso a una información enormemente precisa sobre la posición absoluta, la velocidad y la altitud. Además, la adaptabilidad ambiental mejorada del sistema de IMU aumenta la fiabilidad y la precisión operativas de la L2.
- Precisión de guiñada [6]
- Tiempo real: 0.2°; posprocesamiento: 0.05°
- Precisión de cabeceo/rotación [6]
- Tiempo real: 0.05°; posprocesamiento: 0.025°
Sin calentamiento de la IMU
Se ha mejorado notablemente el rendimiento del sistema de la IMU para que se pueda utilizar en cuanto se enciende. Y el dron que la lleva está listo para iniciar tareas inmediatamente en cuanto el RTK pase a estado FIX, para ofrecer una experiencia sobre el terreno optimizada.
Cámara de mapeo RGB
CMOS 4/3, obturador mecánico
El tamaño de los píxeles se ha aumentado a 3.3 μm y los píxeles efectivos ahora llegan a 20 MP, lo que da como resultado una notable mejora en el sistema de imágenes general, así como detalles de las nubes de puntos con colores auténticos más ricos. El intervalo mínimo entre fotos se ha reducido a 0.7 segundos. La cámara de mapeo tiene una cuenta de obturación de hasta 200 000 veces, lo que reduce aún más los costes operativos. Cuando no es necesario recopilar nubes de puntos, la cámara RGB aún puede tomar fotos o vídeos, o recopilar imágenes para mapas de luz visible.
Experiencia operativa mejorada
Notas:
- Medido en las siguientes condiciones en un entorno de laboratorio de DJI: Zenmuse L2 montada en un Matrice 350 RTK y encendida. Usando la ruta de área de DJI Pilot 2 para planificar la ruta de vuelo (con Calibrar IMU activada). Usando escaneo repetitivo con RTK en estado FIX. La altitud relativa se estableció en 150 m; la velocidad de vuelo, en 15 m/s y la inclinación del estabilizador, en −90°; cada tramo recto de la ruta de vuelo tenía una longitud inferior a 1500 m. El campo contenía objetos con características angulares obvias y usó puntos de verificación al descubierto en superficies duras, en conformidad con el modelo de reflexión difusa. Se usó DJI Terra para realizar el posprocesamiento con Optimizar precisión de nube de puntos activada. En las mismas condiciones con Optimizar precisión de nube de puntos no activada, la precisión vertical es de 4 cm y la precisión horizontal es de 8 cm.
- Medido con Zenmuse L2 montada en el Matrice 350 RTK, con una velocidad de vuelo de 15 m/s, altitud de vuelo de 150 m, tasa de solapamiento lateral del 20 %, Calibrar IMU activado, Optimización de elevación apagada y seguimiento del terreno apagado.
- Los datos presentados son valores típicos. Medido usando un objetivo plano con un tamaño superior al diámetro del rayo láser, un ángulo de incidencia perpendicular y una visibilidad atmosférica de 23 km. En entornos con poca luz, los rayos láser pueden lograr el alcance de detección óptimo. Si un rayo láser alcanza a más de un objetivo, se divide la potencia total del transmisor del láser y se reduce el posible alcance. El alcance de detección máximo es 500 m.
- Tras encenderla, la IMU no requiere calentamiento. Sin embargo, los usuarios deben esperar a que el dron entre en estado FIX antes de que pueda volar y funcionar.
- Calculado en comparación con Zenmuse L1.
- Medido en las siguientes condiciones en un entorno de laboratorio de DJI: Zenmuse L2 montada en un Matrice 350 RTK y encendida. Usando la ruta de área de DJI Pilot 2 para planificar la ruta de vuelo (con Calibrar IMU activada). RTK en el estado FIX. La altitud relativa se estableció en 150 m; la velocidad de vuelo, en 15 m/s y la inclinación del estabilizador, en −90°; cada tramo recto de la ruta de vuelo tenía una longitud inferior a 1500 m.
- Los modelos 3D se procesan mediante representación dispersa.
- Solo permite generar informes de calidad de las siguientes tareas: Trayectoria, Área y Lineal.
Productos relacionados


